St Robotics Pneumatic Parallel Robot Gripper

Tehnička dokumentacija
Tehnički podaci
Brand
St RoboticsGripper Type
Pneumatic
End Effector
Parallel
Number of Fingers
2
Gripping Force
18 → 60N
Stroke
8mm
Zemlja podrijetla
United Kingdom
Detalji o proizvodu
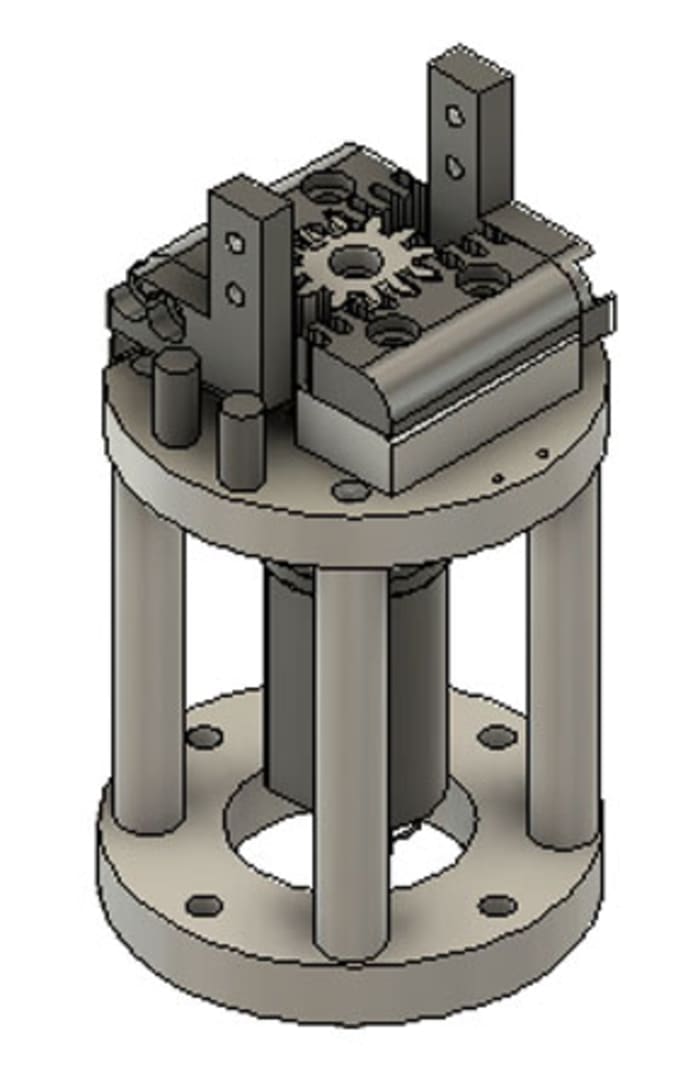
ST Robotics PG17 Pneumatic Gripper for R17
The PG17 pneumatic gripper designed for the R17 robot arm uses linear slides which enable high accuracy and repeatability. The basic option comprises of a pneumatic circuit and one gripper with 4 tapped holes for extra mounts enabling the fitting of customised fingers.

Cena na upit
1
Cena na upit
1
Informacije o stanju skladišta trenutno nisu dostupne.
Proverite ponovno kasnije.
Tehnička dokumentacija
Tehnički podaci
Brand
St RoboticsGripper Type
Pneumatic
End Effector
Parallel
Number of Fingers
2
Gripping Force
18 → 60N
Stroke
8mm
Zemlja podrijetla
United Kingdom
Detalji o proizvodu
ST Robotics PG17 Pneumatic Gripper for R17
The PG17 pneumatic gripper designed for the R17 robot arm uses linear slides which enable high accuracy and repeatability. The basic option comprises of a pneumatic circuit and one gripper with 4 tapped holes for extra mounts enabling the fitting of customised fingers.